As I am gathering my map data and writing my final research paper, it is interesting and important to observe inwards instead of outwards to understand my relationship with my own spatial surroundings and what sort of mental map markers are beginning to form in my head. I am studying in Korea for the Fall semester as part of an NYU exchange program. My current world radiates in tendrils and blobs from my friend’s apartment that I am staying at. I know in extreme detail the locations of things that are stored away and stacked in certain rooms such as the living room, bedroom, and bathroom. However, there are still other rooms that are blank in my spatial map, such as the random door in the kitchen that I never bothered to open, but it exists logically as a pantry in my mind for now. I also know the skyline and landmarks in the distance of Seoul that I have never visited in person. I have a birds eye understanding of where I am, but only from this specific perspective from this x,y,z coordinate. Blind spots form that are blocked by other buildings and this understanding allows me to see a lot but understand nothing at all. I know the inside of a random venue in another city, but it is isolated from the main hub of my life as I arrived in a taxi called by my friend.

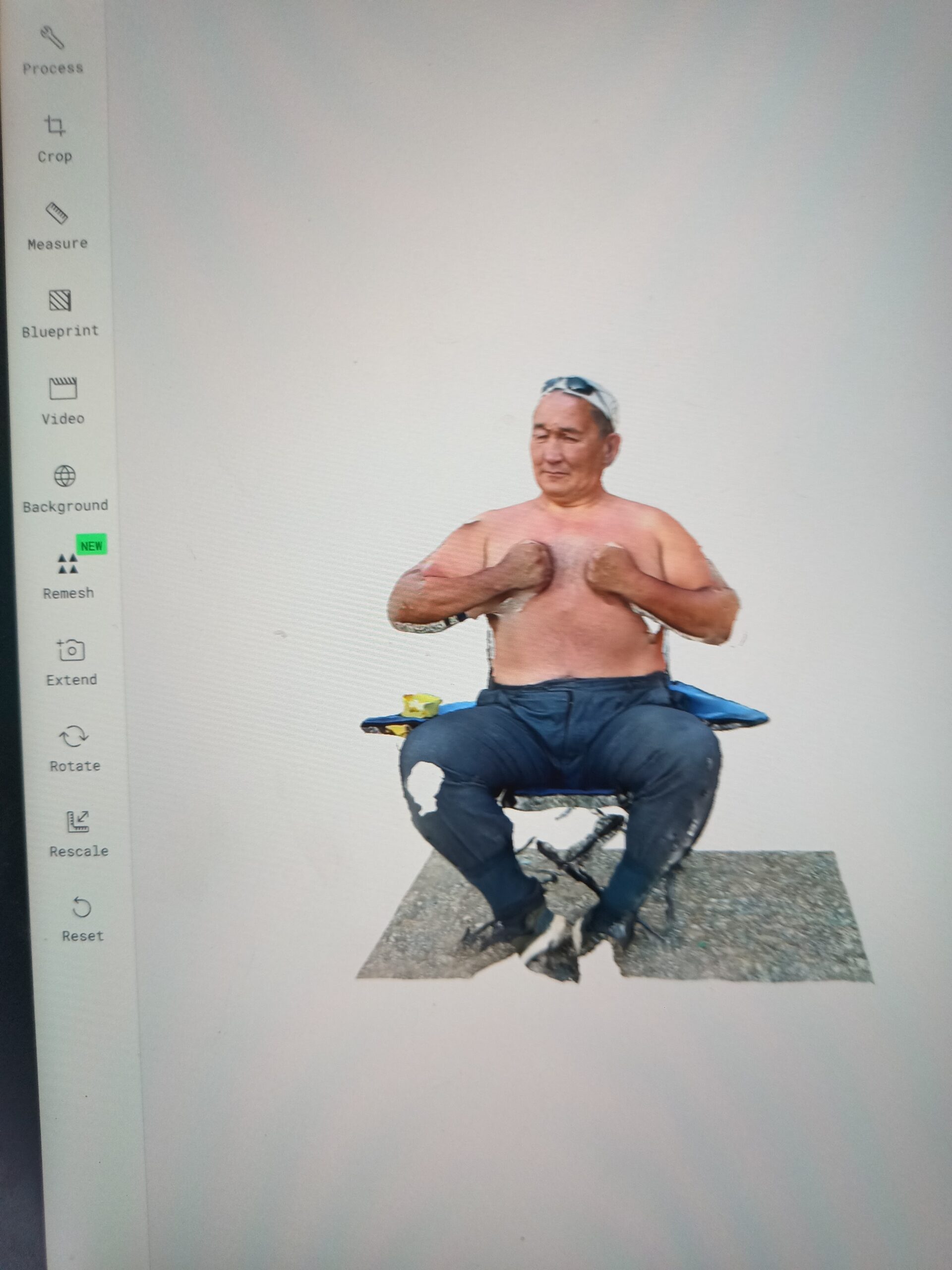
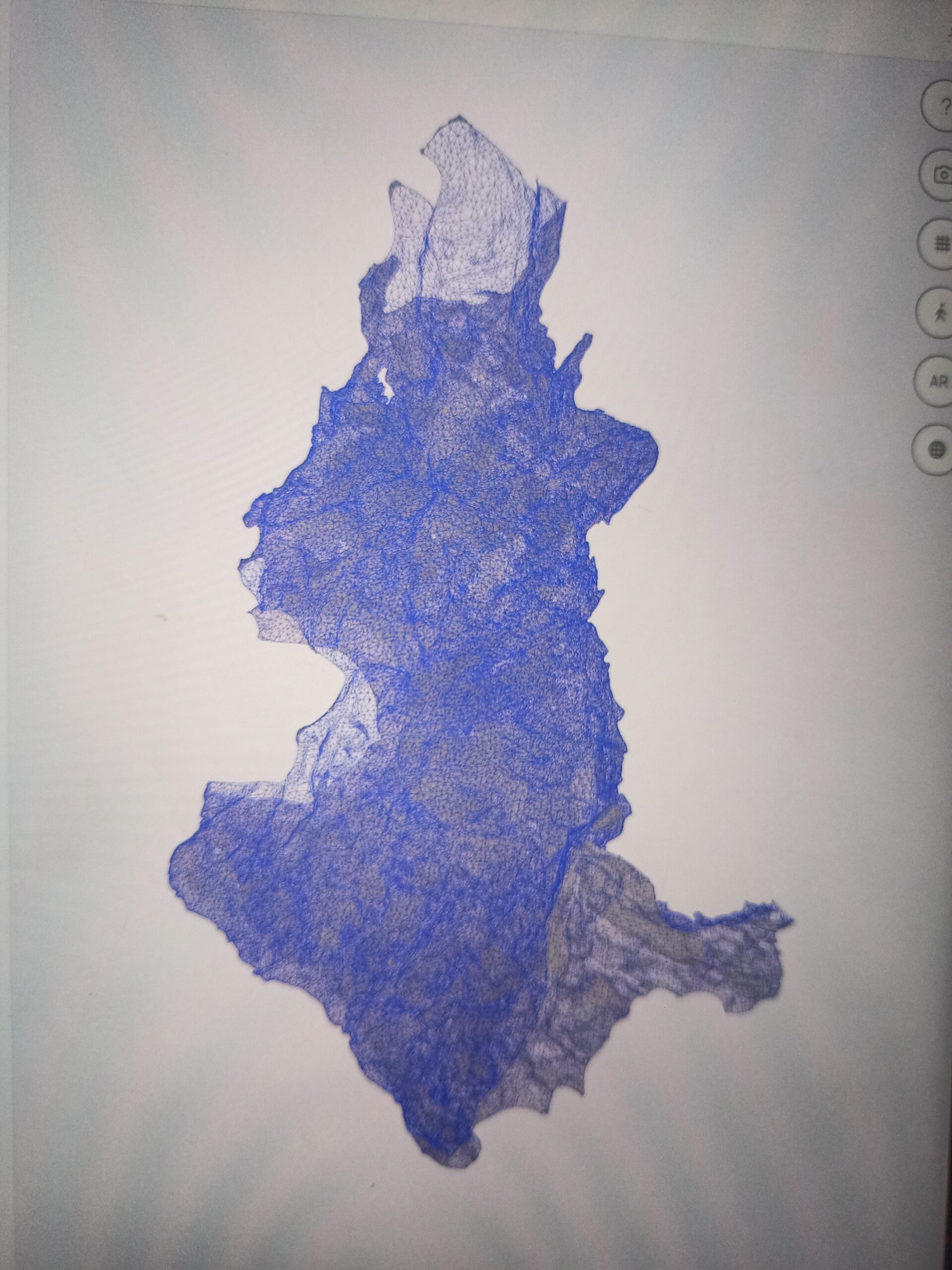
In short, this unique experience of being aware of my mental mapping practice of a new place reminds me of my experience with LiDAR mapping the cave in Kazakhstan with my iPad. I mapped the site of our archaeology site cave with LiDAR in 2 ways, one using my Caveatron and one with the iPad. I wanted to compare the two maps that I made in terms of ease in data acquisition, data processing, applicability, and usability/understandability of the final map. Although I walked into my research project with the idea that my Caveatron would be the future of low-cost LiDAR cave mapping, I started to realize that there are several fallbacks to it that I hadn’t realized before. Honestly, it was a bit of a blow at first recognizing this considering I sunk so much time, energy, and hopes into building it last semester, but I am very happy to have spent the experience building and learning the LiDAR device as it’s given me a deeper understanding of LiDAR that I couldn’t have gained otherwise. I will speak more in depth about the advantages (there are still a lot) and disadvantages of the Caveatron when compared to iPad mapping in my final paper.
For now, I will continue to adapt to my new life and continue this organic form of mapping in my own brain as I finish the rest of my paper.
As the summer and my project concludes, I find myself moving my life to a different country and adapting to a different world. Being somewhere completely new always feels the same, even if the places are distinct. There is a prevailing feeling that it will never feel like second nature navigating around. No matter how many times this is proven wrong, the sensation is always the same. This is my first experience of having this sensation of being in a country I have never visited before and deciding to spend half a year here studying abroad. I know the maps of the city will take form as I allow them to marinate through time and habit, and now in the rare days of my blank-slated brain, I appreciate this feeling of being utterly lost.
For now, I will continue to adapt to my new life and continue this organic form of mapping in my own brain as I finish the rest of my paper.